
I am a Researcher in the field of Computer Vision and Robotics at Techincal University Dortmund, where I also completed my MSc in Automation and Robotics. My research area is high speed perception and human drone interaction in warehouse like environments. I work at the logistics facility of TU Dortmund which is also shared by the Fraunhofer IML. I have hands on experience in deep learning, computer vision, and robotics.
Seeking research and industry opportunities
📰Updates
Publications

MTevent: A Multi-Task Event Camera Dataset for 6D Pose Estimation and Moving Object Detection
1 TU Dortmund · 2 Lamarr Institute
CVPR 2025 — Workshop on Event-based Vision
MR6D: Benchmarking 6D Pose Estimation for Mobile Robots
1 TU Dortmund · 2 Fraunhofer IML · 3 Lamarr Institute
ICCV 2025 — R6D Workshop

 Dataset
Dataset 
Video-based Pose-Estimation Data as Source for Transfer Learning in Human Activity Recognition
Pattern Recognition in Embedded Systems Group TU Dortmund
ICPR 2022
Projects
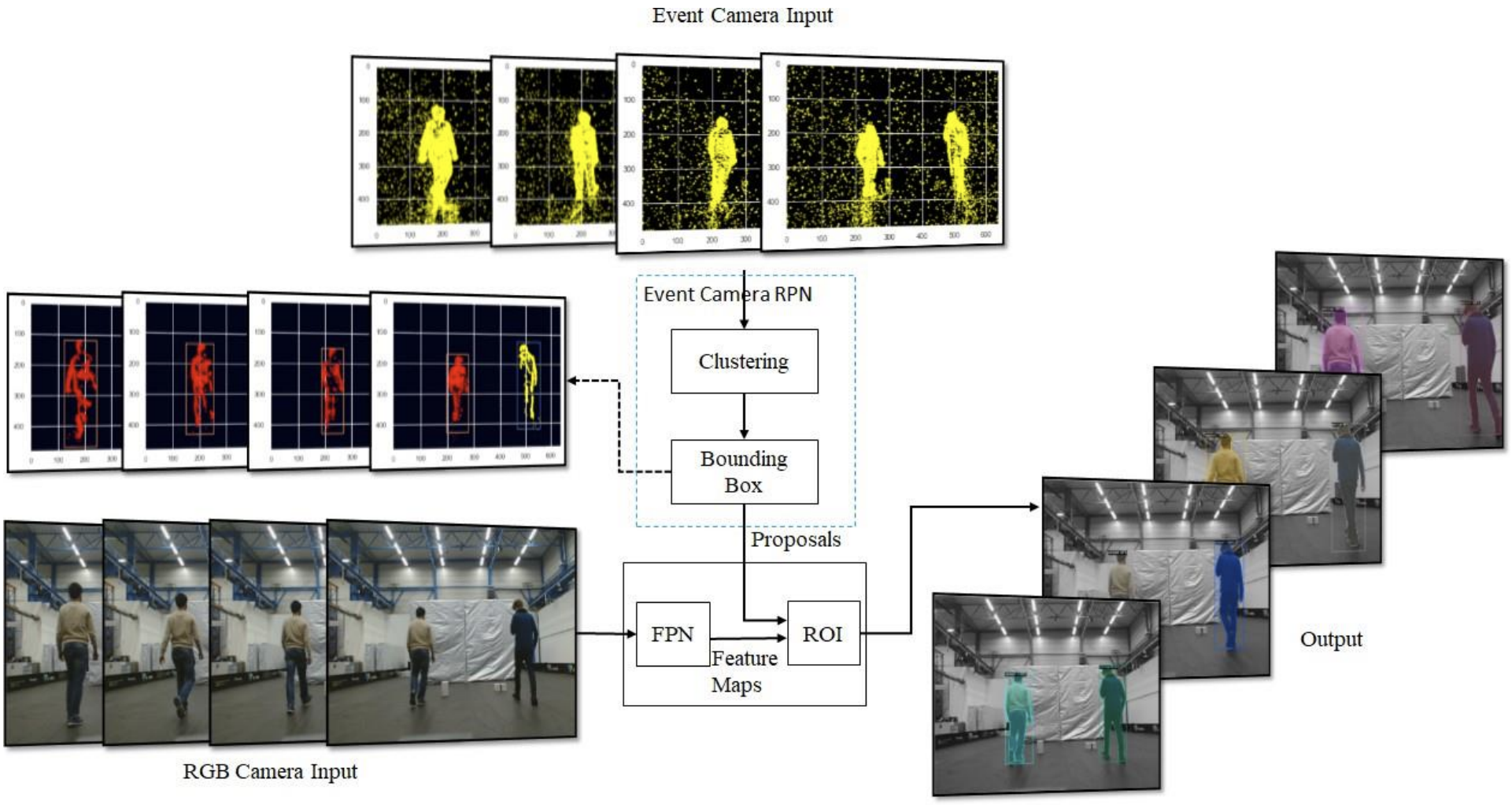
EventRec
TU Dortmund · (2023 – Ongoing)


I proposed and led the EventRec project, taking it from concept to securing funding from the AIF/IGF in close collaboration with colleagues.
The project aims to enable high-speed robots to perceive and interact with their environment using event cameras. As project lead, I managed a small research team that created the MTEvent dataset and am currently working on developing novel methods for 3D detection of moving objects, advancing real-time perception capabilities for robots to navigate safely and efficiently in dynamic environments at high speed.
Industry partners: KION, Jungheinrich, Framos, Safelog and others.
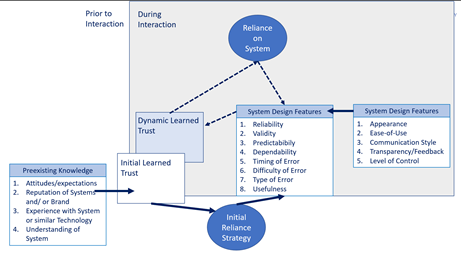
Drone Trust
TU Dortmund (2021 – 2024)
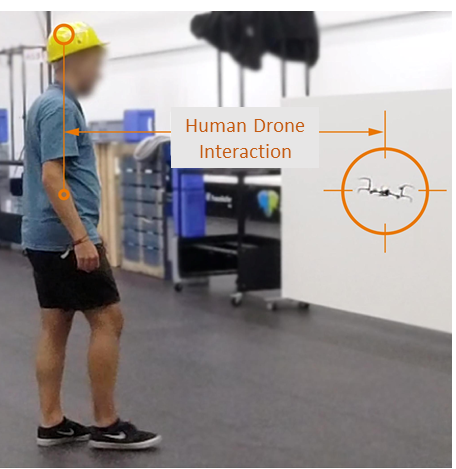
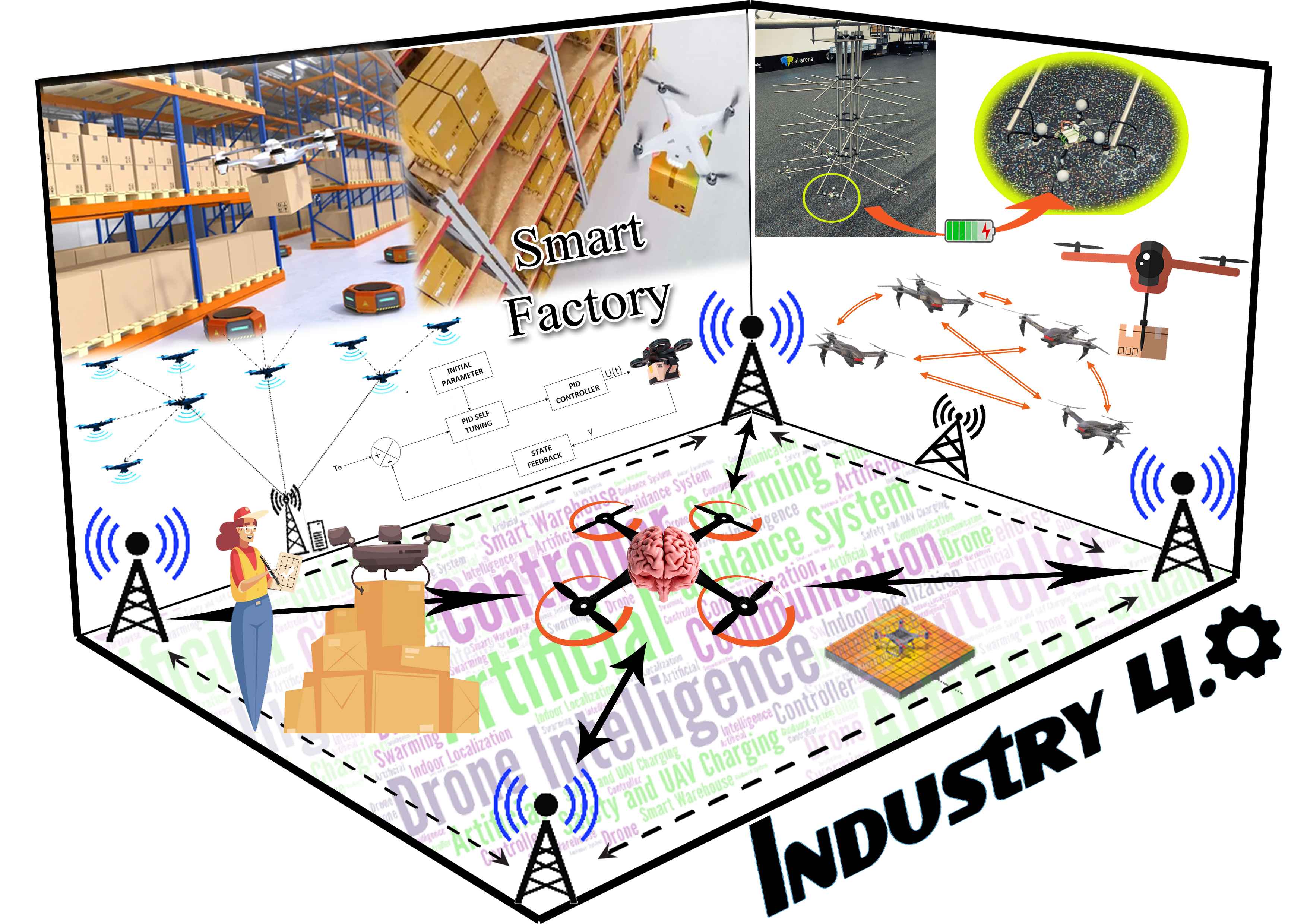
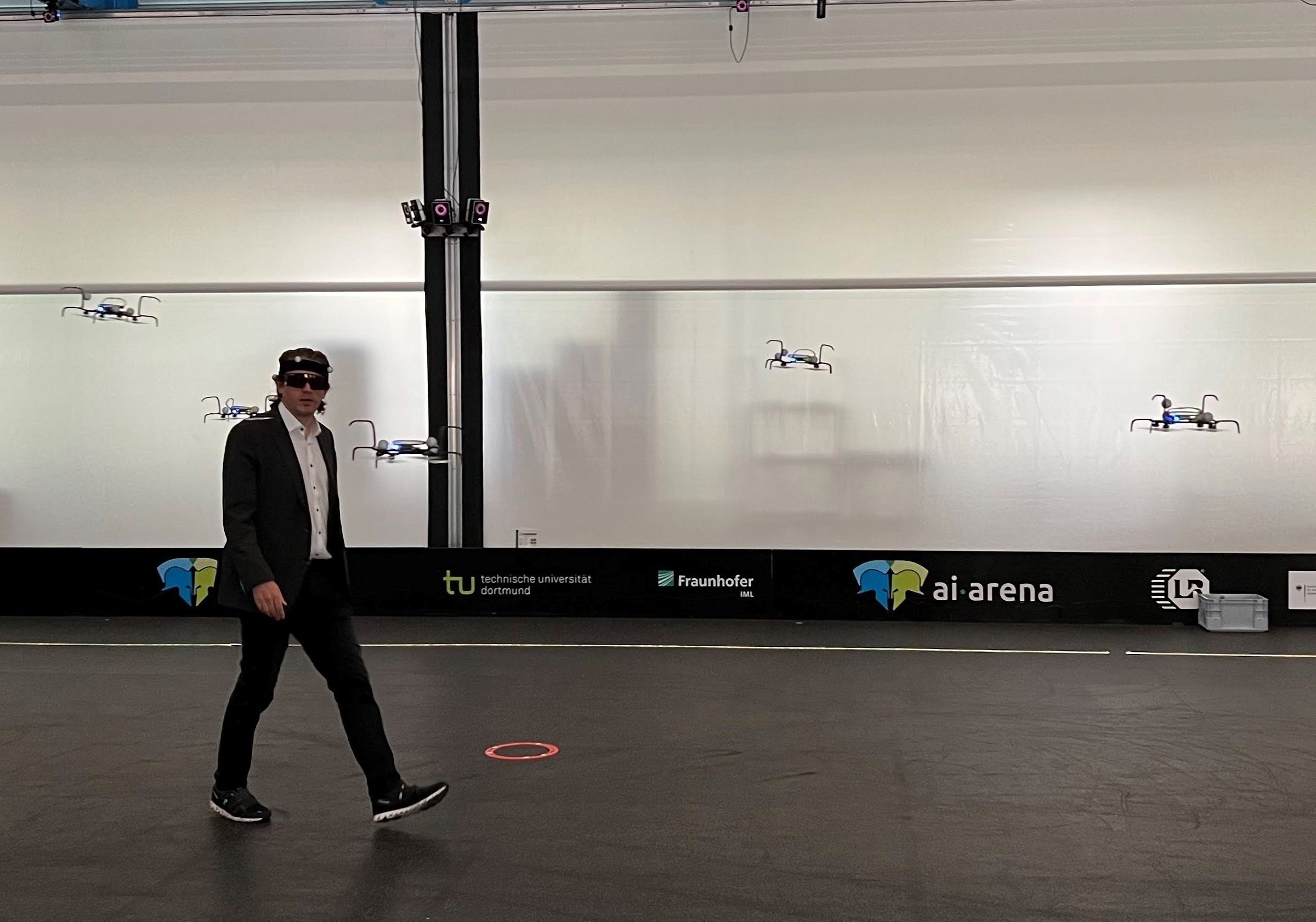
Project Description: This project investigates the integration of micro–unmanned aerial vehicle (UAV) swarms in indoor industrial environments, focusing on safe human–robot collaboration and perception-driven autonomy.
A comprehensive framework and digital-twin simulation is developed to demonstrate the feasibility of UAV swarms performing logistics tasks such as transport, guiding humans and inspection in constrained warehouse settings. In parallel, machine learning methods for human activity recognition are explored. A dataset consisting of human UAV interaction in a warehouse setting is also published on Zenodo.
Partners: Ruhr University Bochum, UPM Madrid, Fraunhofer IML Dortmund, Technical University Dortmund.
About Me
Work Experience
Research Associate
2021 – Present · Dortmund
Researching in the field of high-speed perception and human UAV collaboration in Warehouse logistics.
Student Resrearch Assistant
2019 – 2021 · Dortmund
Engineered unit tests for Deep Reinforcement Learning workflows and conducted predictive demand forecasting for Germany's EV charging infrastructure.
Technology Analyst
2014 – 2018 · India
Infosys Limited
Education
MSc · Automation & Robotics
2018 – 2021
TU Dortmund
B.E. · Electronics & Instrumentation
2010 – 2014
IET DAVV, Indore, India